
Die Welt durch die Augen eines autonom fahrenden Fahrzeugs sehen – dies ermöglicht das neue moovel lab Projekt „Who Wants to Be a Self-Driving Car“. Verschiedenste Informationen aus einer 3D-Tiefen Kamera, LIDAR Scanner und Sensoren, die auf einem unkonventionellen Fahrzeug angebracht sind, werden gebündelt und in einer Virtual Reality Brille visualisiert. Besucher der Push UX Konferenz München und des KiKK Festivals in Belgien können das neueste moovel lab Projekt testen.Das moovel lab ist ein interdisziplinäres dreiköpfiges Team innerhalb der moovel Group, das sich in kreativen Projekten mit Zukunftsfragen der Mobilität und menschlichen Verhaltensweisen in städtischen Gebieten auseinandersetzt. Das neueste moovel lab Projekt heißt “Who Wants to Be a Self-Driving Car”. Wie werden autonom fahrende Fahrzeuge unsere Mobilität verändern? Wie nehmen autonome Fahrzeuge ihre Umwelt wahr? Wie stellen sich andere Verkehrsteilnehmer in Form von Fahrzeugen, Fahrradfahrer und Fußgänger dar? Und anhand welcher Informationen bewegt sich das Fahrzeug im Verkehrsgeschehen? Diese Fragestellungen liegen dem moovel lab Projekt zugrunde. Eine Annäherung an diese Fragen ermöglicht ein eigens aufgebautes, unkonventionelles Fahrzeug, welches das moovel lab Team mit Sensoren und Kameras ausgestattet hat. Das Fahrzeug wird mit Hilfe eines VR-Headset gesteuert, das durch dreidimensionales Mapping und Objekterkennung den Fahrer dabei unterstützt, zu navigieren. Der Mensch nimmt sozusagen die Rolle des selbstfahrenden Autos ein.
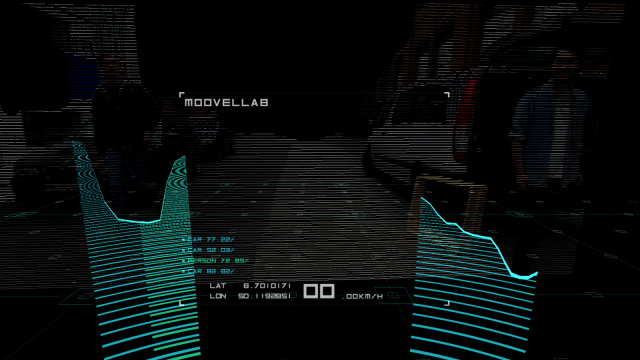
Über VR-Headset wird der Fahrer mit den Daten versorgt, um das Fahrzeug zu steuern
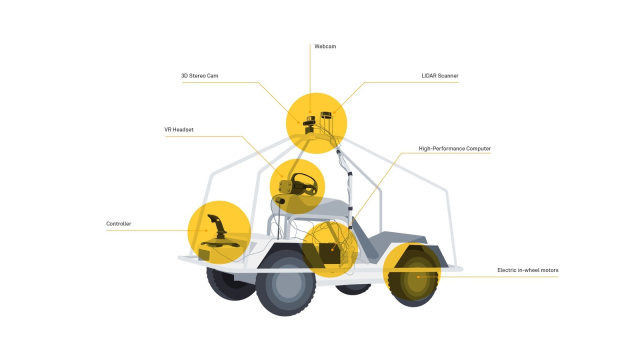
Mit “Who Wants to Be a Self-Driving Car” sollte ein Prototyp geschaffen werden, in dem der menschliche Sehsinn durch solche Sensoren ersetzt wird, wie sie in selbstfahrenden Fahrzeugen zum Einsatz kommen könnten. Bei dem Prototyp handelt es sich um ein nicht-autonomes Fahrzeug, in welchem der Computer - als Entscheidungsträger und Steuerungs-einheit - durch den Menschen ersetzt wird. Das Fahrzeug besteht aus einer Plattform mit elektrischen Radnabenmotoren und Sensoren. Zum Lenken, Beschleunigen und Anhalten des Fahrzeugs wird ein Steuergerät verwendet. Der Fahrer legt sich mit dem Kopf nach vorne ausgerichtet auf das Fahrzeug. Diese Liegeposition samt VR-Brille verstärkt das Gefühl der Immersion und erlaubt völliges Eintauchen während der Fortbewegung.

Zwei Arten von Sensoren ermöglichen das VR-Erlebnis. In der Hauptansicht werden die Daten einer 3D-Tiefen-Kamera präsentiert, um die Landschaft in Echtzeit abzubilden. Die Bild-information der 3D Kamera wird durch eine automatisierte Objekterkennung der Fahrzeug-umgebung ergänzt. Dies gibt dem Fahrer Informationen darüber, welche Objekte vom Computer erkannt werden. Schließlich sorgt ein LIDAR-Sensor (Light Detection and Ranging) für eine zusätzliche Ebene der Abstandsmessung, indem der Sensor Lichtimpulse in Richtung nahe gelegener Objekte aussendet und daraus deren Distanz ermittelt. Diese Komponenten werden im VR-Headset zusammengeführt, und versorgen den Fahrer mit den nötigen Daten, um das Fahrzeug zu steuern.
Das moovel lab stellt das Projekt im Oktober und November 2017 auf zwei Konferenzen vor: Zunächst auf der “Push UX” Konferenz am 20. und 21. Oktober in München sowie auf dem “KiKK” Festival, Europas renommierten Festival für digitale und kreative Kultur vom 2. bis 4. November im belgischen Namur. Unter selfdriving.moovellab.com können Interessierte sich über das Projekt und weitere Events informieren.


Keine Kommentare
Schreibe einen Kommentar